51uwb.cn
标题: DWM1000 智能跟踪小车演示视频 [打印本页]
作者: tuzhuke 时间: 2018-11-23 10:32
标题: DWM1000 智能跟踪小车演示视频
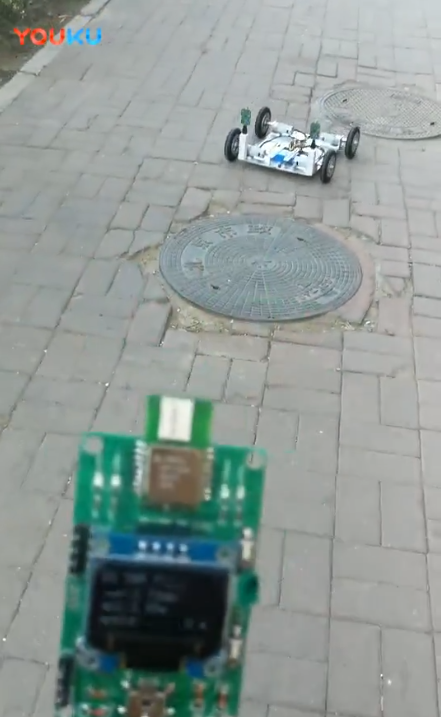
UWB 智能跟踪小车:一共三个UWB模块,手持一个,小车上两个。
通过测量小车上两个模块与手持模块之间的距离,通过三角函数,计算出手持模块的相对角度,通过相对角度控制小车转弯。
通过小车上某一个模块与手持模块直接的距离,控制小车是否启动(视频中设定距离为1m)
注意点: 小车上两个模块距离要稍微尽量远一点,这样测距误差对于角度的误差会相对较小。
其它:使用两个模块只能计算角度和距离,但是无法确定手持模块在车前还是车后,也就是小车只能向前走,如果要实现倒车,则需要再加一个模块。
作者: 2641820118 时间: 2024-5-6 19:39
大佬可以分享一下代码和硬件选型之类的吗,非常感谢
作者: 吱吱吱1717 时间: 2024-5-19 21:49
请问这个代码可以分享一下吗,谢谢
作者: 想起温柔沉默默 时间: 2024-7-19 17:40
感谢大佬分享
作者: uwb888 时间: 2025-4-6 10:04
楼主,代码,怎么卖的,加我微信MQHZ88888888
| 欢迎光临 51uwb.cn (https://www.51uwb.cn/) |
Powered by Discuz! X3.3 |