wwweijay 发表于 2024-5-7 16:33 你圖片顯示的因爲有其他編輯器打開了這個文件導致的。 編譯只有warming沒有error沒有問題。 |
wwweijay 发表于 2024-5-7 11:18 #if 0 改 #if1 后依然打印mr 那你应该是没有全部编译,2个基站1个标签需要全部再修改为#if 1 后重新编译。 基站0和基站1 的距离,以实际模块距离测量为准,可以用直尺量,然后填在代码里 |
|
本帖最后由 wwweijay 于 2024-5-7 11:19 编辑 要怎麼確保基站0和基站1測距 目前三個模塊上電能夠正常跑出 m r ..... If p改成1 了也一樣 |
|
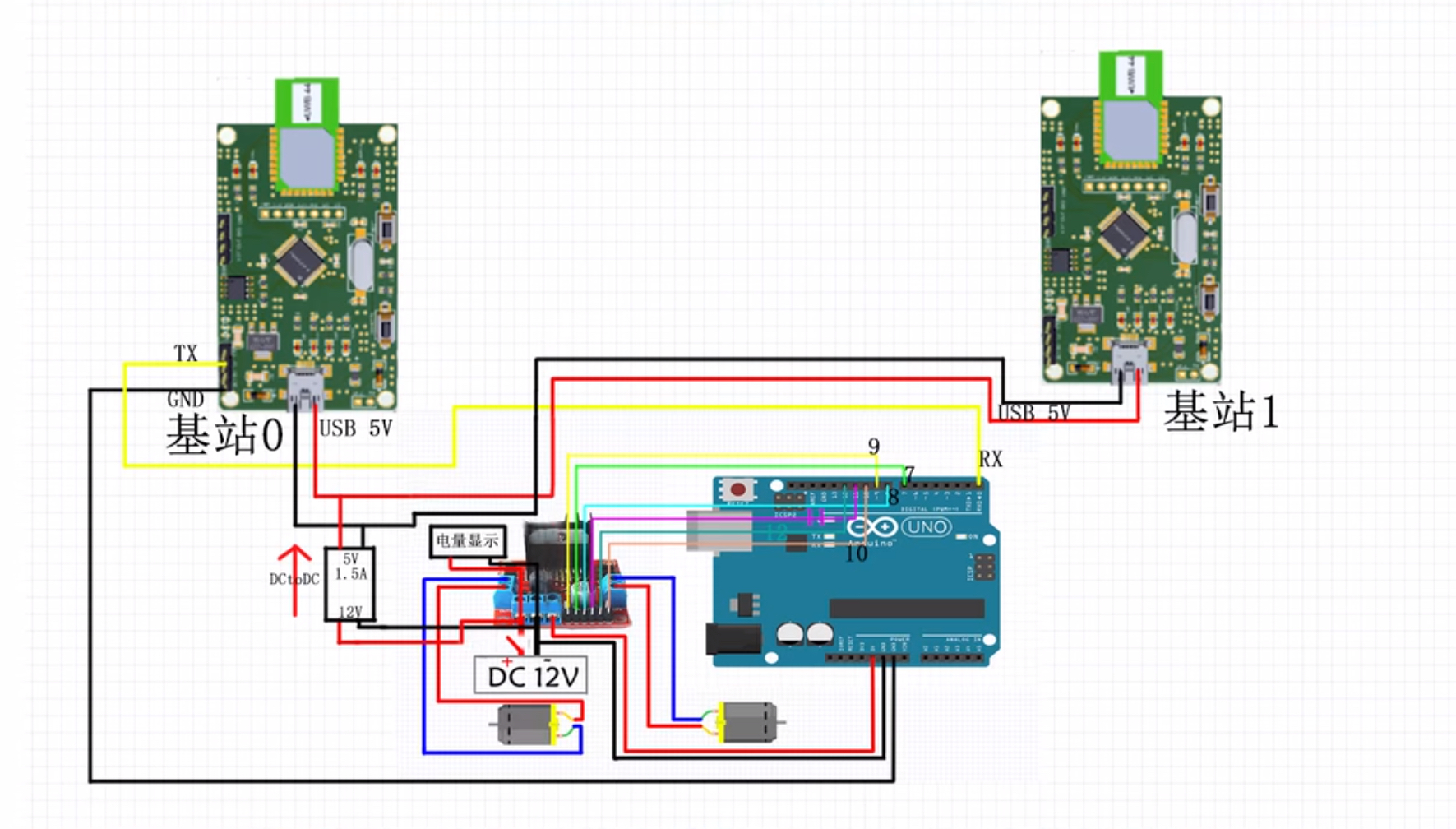
1. 不做跟随模式修改,先用定位模式,确保标签可以和基站0和基站1 测距 2. 在以上步骤完成后,修改代码使用跟随模式,如下,宏定义需要修改为#if 1. 3. 先不要连接小车,将基站0 的串口连接电脑,看看是否有LRFS字符
|
GMT+8, 2026-4-12 09:10 , Processed in 0.017309 second(s), 9 queries , File On.
Powered by Discuz! X3.3
© 2001-2017 Comsenz Inc.

 收藏
收藏