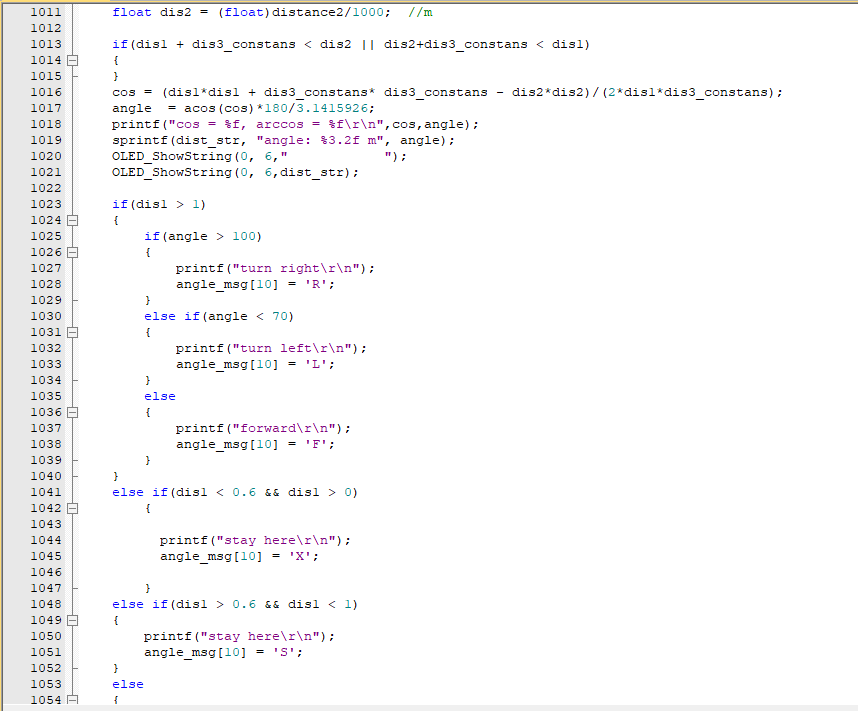
zzzggghkk 发表于 2024-12-12 09:28 出现0,可能原因是三角函数解算失败。原因是距离差异较大无法结算合理角度 需要你确认下面几个问题: 1. 两个基站距离,确切是uwb 天线距离,和代码中配置的距离是否一致,必须用尺子量。 2. 增加输出功能,把标签和两个基站距离都输出,确保在大于1m,或者你常用跟随距离条件下,测距是稳定,而且是准确的。如果距离偏差较大,可以参考资料包根目录视频pdf中的天线延时调整视频,进行调整。 |
|
1. 默认例程,是哪个代码? 2. 我们代码里没有角度输出 请提供代码版本号以及具体修改 |
GMT+8, 2026-4-12 20:01 , Processed in 0.018997 second(s), 7 queries , File On.
Powered by Discuz! X3.3
© 2001-2017 Comsenz Inc.

 收藏
收藏