本帖最后由 wenhorm 于 2023-6-21 22:14 编辑
|
|
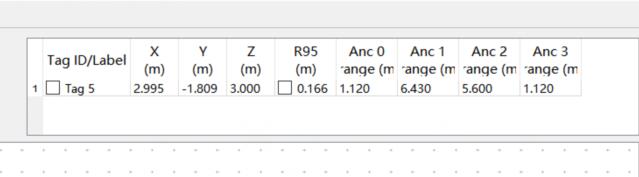
1. 是的,你可以看用户手册描述。坐标是相对坐标,所有模块(基站和标签)都是相对关系。 2,是定位不是测距,是标签相对于基站0的一个相对坐标 3., 途中anc x range就是基站与标签的距离,与液晶上显示对应 |
GMT+8, 2026-5-5 03:23 , Processed in 0.028426 second(s), 7 queries , File On.
Powered by Discuz! X3.3
© 2001-2017 Comsenz Inc.

 收藏
收藏