| 很好啊啊啊 啊 |
weimingming 发表于 2019-10-24 16:25 扫地机器人用这个成本太高了  |
| 这不就是扫地机器人吗? |
34103410 发表于 2019-5-25 10:11 这个你可以看跟随视频,只要车头不是反着就可以,有角度会自动调节过来。 如果无法确定车头正反,可以在跟随小车上再加一个模块用来确定 |
| 请问第二种方案在小车启动时, 小车如何能判定车头方向是对着目标点的 |
|
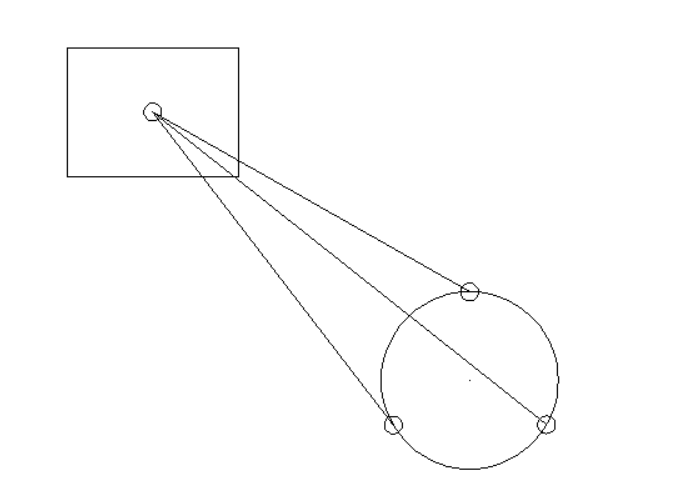
我觉得方案一可能精度会更好 1 方案1车本身较大。余玄定理算出来会更准 2 方案2,正如你所说的,小车在圆外精度差,而且圆本身不大,内部精度也不一定很高。 综上,优先考虑方案1 |
GMT+8, 2024-5-4 20:50 , Processed in 0.017934 second(s), 7 queries , File On.
Powered by Discuz! X3.3
© 2001-2017 Comsenz Inc. Template By 【未来科技】【 www.wekei.cn 】

 收藏
收藏